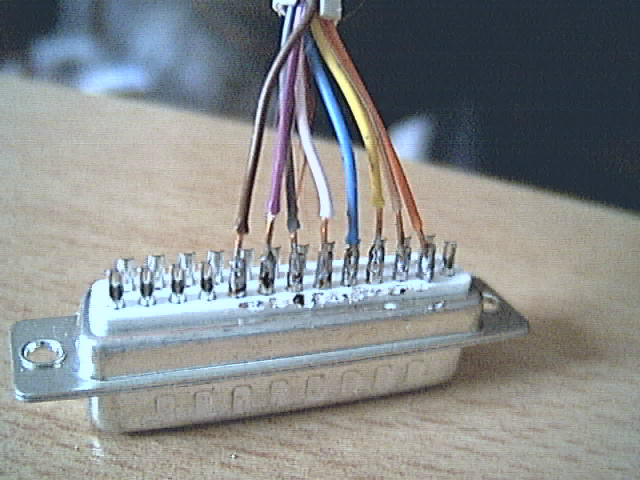
I have built a simple parallel port interface, software oriented, for stepper motors. It can drives two motors, with 500mA output current per phase. As parport cannot directly give this power, we use two ULN2003 darlington array of 7 pairs (we need 8 pairs...).
What you only need is :
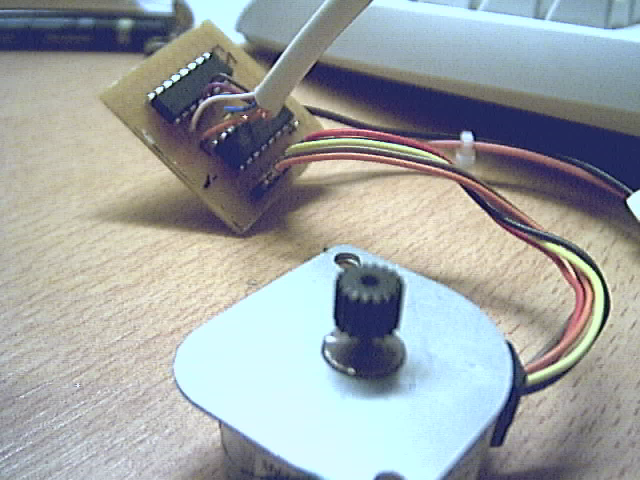
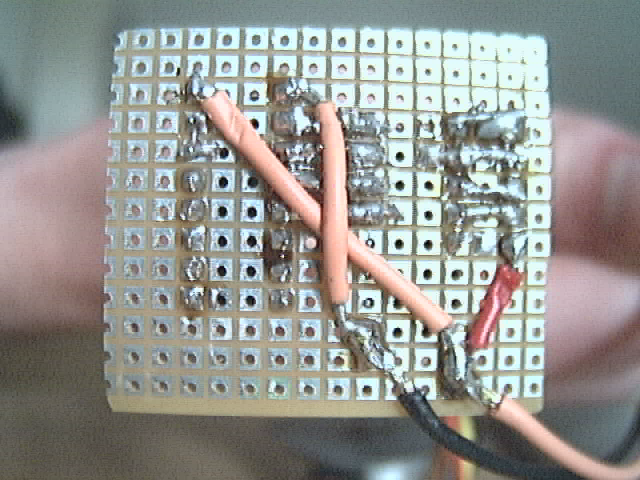
Not hard to build ! The board with one motor plugged - The back of the board. Connect the your parallel port pins to the input pins of the ULN2003A, and the output pins of the ULN2003A to the wires of the motor. Put 12V and ground on the ULN and it's done.
Here is the basic code to make it turn: stepper.c and port.h (on linux).
It must be run as root, compiled with a correct PORT value (watch your dmesg).
vinvin wrote, on Thu, 17 Sep 2009 18:42:18 +0200
You can comment this article and others.
This project does not use any microcontroller.
Discuss this article, add a comment:
{kind=link}
{kind=link}
{kind=link}
{kind=link}